机械教研室丁虹老师开设《蜗轮蜗杆传动旋向判别》公开课
2024年6月26日第2节课,丁虹老师在2355班开设题为《蜗轮蜗杆传动旋向判别》的公开课。机械教研施亚梅、翟善民、马海波等人参与听评课活动。
本课按蜗轮蜗杆参数——蜗轮蜗杆旋向——蜗轮旋转方向判别——蜗杆传动应用的思路展开授课。先引分析旋向和哪些因素有关,后讲旋向判别的方法,再旋向应用。教学效果良好。
评课环节,大家一致认为良好。建议增加的信息化手段。

课题:5 -2蜗轮蜗杆传动的主要参数、啮合条件和旋向判断
授课课程:机械基础 授课教师:丁虹
授课班级 |
2355 |
授课日期 |
6.12 |
|
|
|
|
|
|
授课类型 |
理论 |
学 时 数 |
2学时 |
|
教学目标 |
1.熟悉蜗轮蜗杆传动的主要参数和啮合条件 2.掌握蜗轮蜗杆传动的旋向判断 |
|
教学内容 |
1.蜗轮蜗杆传动的主要参数 2.蜗轮蜗杆传动的啮合条件 3.蜗轮蜗杆传动的旋向判断 |
|
重点难点 |
重点:蜗轮蜗杆传动的主要参数 难点:蜗轮蜗杆传动的旋向判断 |
|
教学方法 |
模型,讲解分析 |
|
教学过程设计 |
备 注 |
课题引入 |
复习提问1:蜗轮传动的特点 2.蜗轮回转方向的判定 |
|
步骤 及 主要内容 |
一、蜗杆传动的主要参数 1.模数m、齿形角α 蜗杆:轴面模数mx1 蜗轮:端面模数mt2 mx1=mt2=m 蜗杆:轴面齿形角αx1 蜗轮的端面齿形角αt2 αx1=αt2=α=20° 中间平面——通过蜗杆轴线并与蜗轮轴线垂直的平面。 (在蜗杆传动中,其几何参数及尺寸计算均以中间平面为准。) 2.蜗杆分度圆导程角γ 指蜗杆分度圆柱螺旋线的切线与端平面之间的锐角。 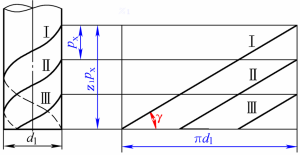
tanγ = px z1/πd1 = z1m / d1 3.蜗杆分度圆直径d1和蜗杆直径系数q 切制蜗轮的滚刀,其分度圆直径、模数和其他参数必须与该蜗轮相配的蜗杆一致,齿形角与相配的蜗杆相同。 为了使刀具标准化,限制滚刀的数目,对一定模数m的蜗杆的分度圆直径d1作了规定,即规定了蜗杆直径系数q,且q = d1/m。 4.蜗杆头数z1和蜗轮齿数z2 蜗杆头数z1:根据蜗杆传动传动比和传动效率来选定,一般推荐选用z1 = 1、2、4、6。 蜗轮齿数z2:根据z1和传动比i来确定。一般推荐z2 = 29~80。 二、蜗杆传动的正确啮合条件 1.在中间平面内,蜗杆的轴面模数mx1和蜗轮的端面模数mt2相等。即: mx1=mt2 2.在中间平面内,蜗杆的轴面齿形角αx1和蜗轮的端面齿形角αt2相等。即:αx1=αt2 3.蜗杆分度圆导程角γ1和蜗轮分度圆柱面螺旋角β2相等,且旋向一致。即:γ1=β2 三、蜗轮回转方向的判定 (详细讲解) 1.判断蜗杆或蜗轮的旋向 右手法则: 手心对着自己,四指顺着蜗杆或蜗轮轴线方向摆正,若齿向与右手拇指指向一致,则该蜗杆或蜗轮为右旋,反之则为左旋。 2.判断蜗轮的回转方向 左、右手法则: 左旋蜗杆用左手,右旋蜗杆用右手,用四指弯曲表示蜗杆的回转方向,拇指伸直代表蜗杆轴线,则拇指所指方向的相反方向即为蜗轮上啮合点的线速度方向。 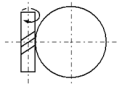 举例 举例
判断蜗轮的回转方向 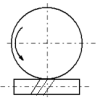 学生练习 学生练习
判断蜗轮的回转方向 |
与齿轮参数比较学习 将纸片三角形展开演示 与直齿齿轮传动、斜齿轮传动比较联系学习 复习螺旋传动判断方法,引导学生找相同点和不同点 师生共同完成 学生演板 |
课堂练习 |
习题册P35应用题 |
|
|
其他 |
|
|
|
小结与作业 |
|
|
课堂小结 |
1、蜗轮蜗杆传动的主要参数和啮合条件 2、蜗轮蜗杆传动的旋向判断 |
|
|
本课作业 |
习题册P33-36 |
|
|
本课教学后记(课堂设计理念,实际教学效果及改进设想) |
|
|
|
